Understanding classifier decision under novel environments is central to the community, and a common practice is evaluating it on labeled test sets. However, in real-world testing, image annotations are difficult and expensive to obtain, especially when the test environment is changing. A natural question then arises: given a trained classifier, can we evaluate its accuracy on varying unlabeled test sets? In this work, we train semantic classification and rotation prediction in a multi-task way. On a series of datasets, we report an interesting finding, i.e., the semantic classification accuracy exhibits a strong linear relationship with the accuracy of the rotation prediction task (Pearson’s Correlation r > 0.88). This finding allows us to utilize linear regression to estimate classifier performance from the accuracy of rotation prediction which can be obtained on the test set through the freely generated rotation labels.
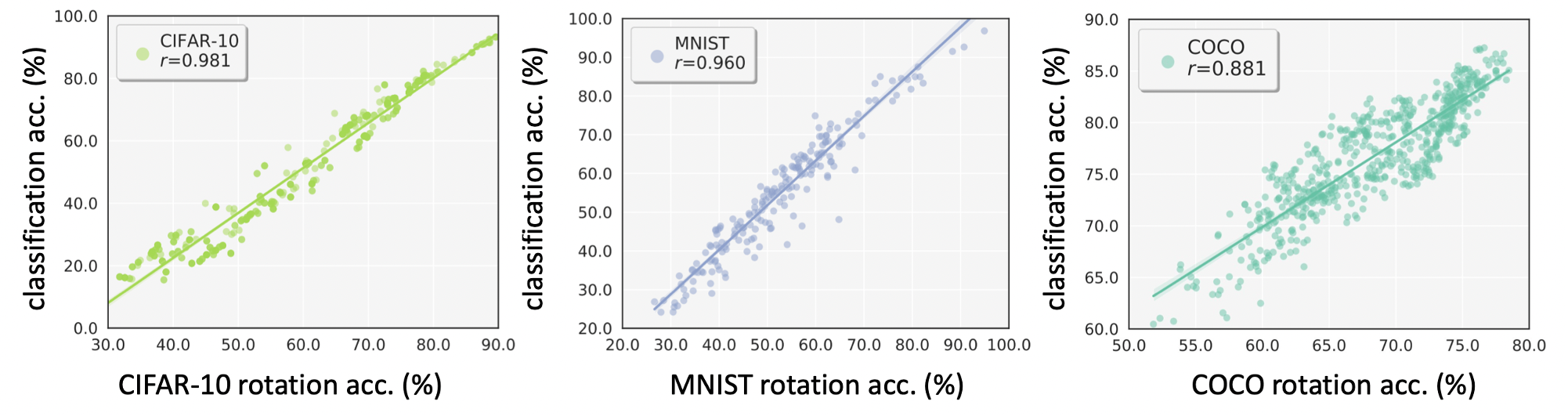
In this paper, we try to estimate classifier accuracy under varying testing environments without human-annotated labels. We report a strong linear correlation (r > 0.88) between semantic classification accuracy and rotation prediction accuracy through empirical studies. This interesting finding makes it feasible to estimate classifier accuracy on unlabeled test sets using rotation prediction performance which can be easily obtained. The extensive experiments provide supports and insights for using such a pretext task to predict the generalization ability of the classifier.
Discussion
[Main Contribution] Our work does not aim to improve supervised classification by using self-supervised tasks.
Rather we offer a new and interesting perspective into the relationship between these tasks,
a finding that allows estimation of generalization performance for semantic classification models from easily obtained self-supervised rotation prediction results.
Point 1: why use rotation prediction? How about other self-supervised learning methods?
The self-supervised task should
1) introduce no learning complexity to the main classification,
2) require minimal network structure change, and 3) not degrade classification accuracy.
We choose rotation prediction as the auxiliary task because it meets the above requirements.
In the experiment, we observe using Jigsaw also has a strong correlation,
but it decreases the classification task accuracy (Table 5).
Point 2: Rotation prediction and classification share the features of the last layer (Layer5).
How about using the previous layer for rotation prediction (e.g., Layer3)?
We have not verified this. However, we believe that as long as the two tasks share features,
the correlation can be preserved when the previous layer (e.g., Layer3) is used for rotation prediction.
Point 3: Can the proposed method be used for model selection and hyper-parameter search?
For the model selection and hyper-parameter search, they assume fixed training and testing sets and that the classifier is changing.
In comparison, we estimate the performance of a fixed classifier on various test environments, which is a different problem.
So, this idea appears out of the scope, but it might be interesting to study it in future work.
Point 4: Can the proposed method be used for other computer vision tasks such as object detection?
We have not verified this. In order to conduct correlation study,
we need to find more suitable techniques to generate many test sets for object detection,
and we leave it for future work.
Correspondence to {firstname.lastname}@anu.edu.au